Veelgestelde vragen
De betekenis van de termen DHM, DTM en DSM is niet altijd eenduidig bepaald. Informatie Vlaanderen volgt de meest courante definities die ook op Europees vlak in de INSPIRE-dataspecificaties gebruikt worden.
DHM: Digitaal Hoogtemodel (DEM: Digital Elevation Model) wordt gebruikt als de verzamelnaam voor alle datasets die een hoogtewaarde voorstellen. Het Digitaal Hoogtemodel Vlaanderen bevat dan alle datasets die een gebiedsdekkende hoogtewaarde voor Vlaanderen bevatten.
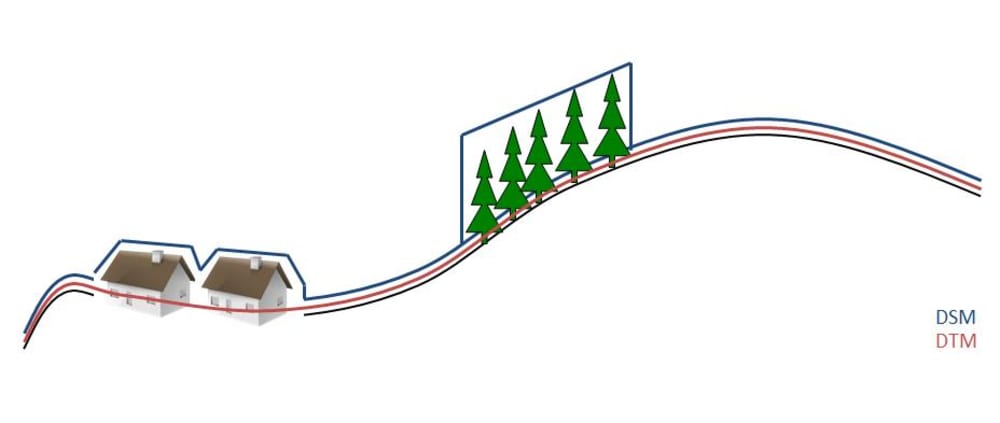
DSM: Digitaal Oppervlaktemodel (Digital Surface Model) heeft een regelmatige en ononderbroken voorstelling van de hoogte van het grondoppervlak (het zogenaamde maaiveld) en alle objecten die zich op het maaiveld bevinden (zie blauwe lijn op de figuur). Tijdelijke voorwerpen zoals auto’s horen hier in principe niet in, maar wegens technische beperkingen zijn deze zeer moeilijk te verwijderen. We kiezen ervoor de Engelstalige afkorting te gebruiken omdat deze het meest gekend is.
DTM: Digitaal Terreinmodel (Digital Terrain Model) heeft een regelmatige en ononderbroken voorstelling van de hoogte van het grondoppervlak (zie rode lijn op de figuur figuur). Hiervoor worden uit het DSM alle objecten zoals huizen of vegetatie verwijderd. De hoogte van het grondoppervlak op deze locaties wordt geïnterpoleerd vanuit nabijgelegen gekende hoogtes.
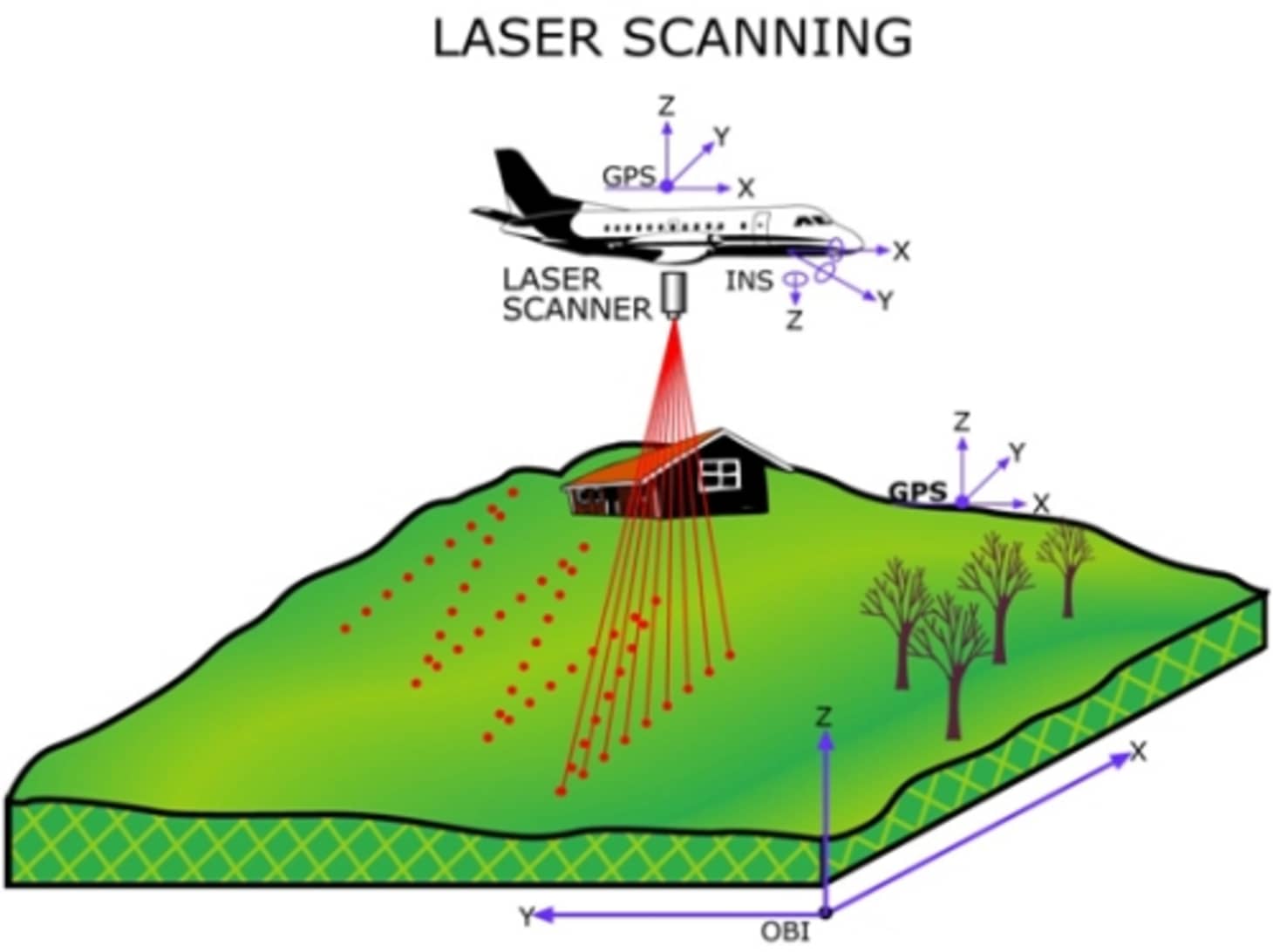
LIDAR (LIght Detection And Ranging of Laser Imaging Detection And Ranging) is een technologie die de afstand tot een object of oppervlak bepaalt door middel van laserpulsen. Deze techniek is vergelijkbaar met radar, dat echter radiogolven gebruikt in plaats van licht. De afstand tot het object of oppervlak wordt bepaald door de tijd te meten die verstrijkt tussen het uitzenden van een puls en het opvangen van een reflectie of echo van die puls. Het is hierbij van groot belang dat de stand en positie van de sensor gekend is op het tijdstip dat de puls uitgestuurd en ontvangen wordt. Deze plaatsbepaling gebeurt door middel van geïntegreerde GPS/INS-systemen.
Voor het aanmaken van het Digitaal Hoogtemodel Vlaanderen II wordt gebruik gemaakt van zeer gesofisticeerde LiDAR-systemen die op een vliegtuig worden gemonteerd.
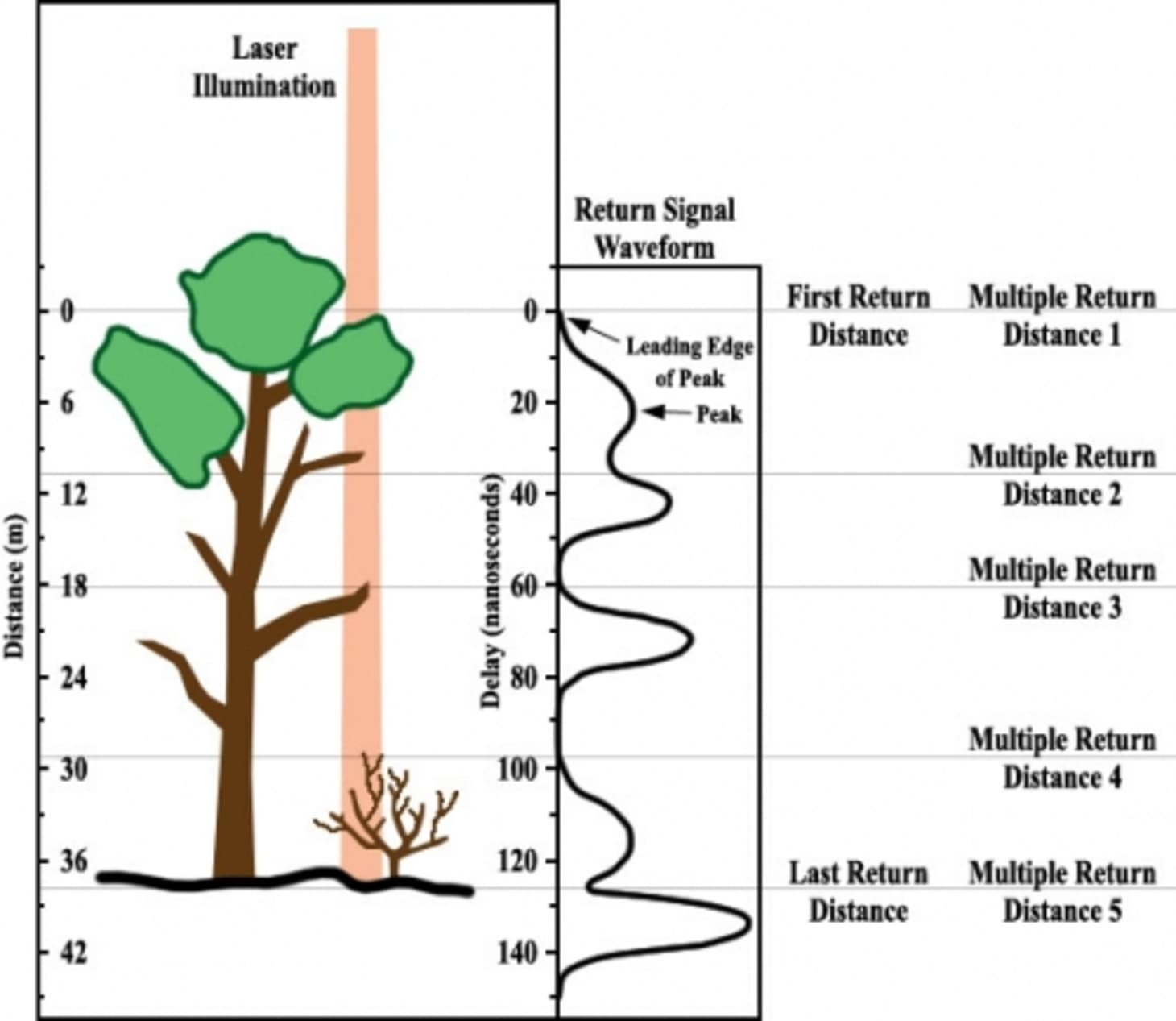
De ingezette systemen sturen tot 400.000 laserpulsen per seconde uit en kunnen meerdere reflecties (of echo’s) per puls ontvangen. Op die manier kan als het ware door de takken van een boom gekeken worden. Het eerste tijdstip komt in dat geval overeen met de top van de boom, het laatste geregistreerde tijdstip is dan zeer waarschijnlijk het grondoppervlak onder de boom.
Een andere techniek voor het aanmaken van hoogtemodellen is fotogrammetrie. Hierbij wordt de hoogte bepaald op basis van metingen in elkaar overlappende foto’s die vanuit verschillende cameraposities werden genomen.
De belangrijkste voordelen van LiDAR in vergelijking met fotogrammetrie zijn:
- Een zeer nauwkeurige hoogtebepaling (< 5 cm)
- Mogelijkheid om ook onder een bladerdek terreinhoogtes te bepalen
- Geen omvalling van objecten, wel schaduw (zones rond objecten waar geen hoogtebepaling mogelijk is)
- In mindere weersomstandigheden en zonder daglicht ook mogelijk (in het geval van het DHMV II worden gelijktijdig foto’s genomen waardoor dit voordeel niet van toepassing is).
Raster- en TIN-formaten vormen een veralgemening van de brondata die als puntenwolken ingewonnen en beheerd worden. Deze twee formaten zijn beter gekend dan puntenwolken en daarmee eenvoudiger te gebruiken in standaard GIS- of andere softwarepakketten.
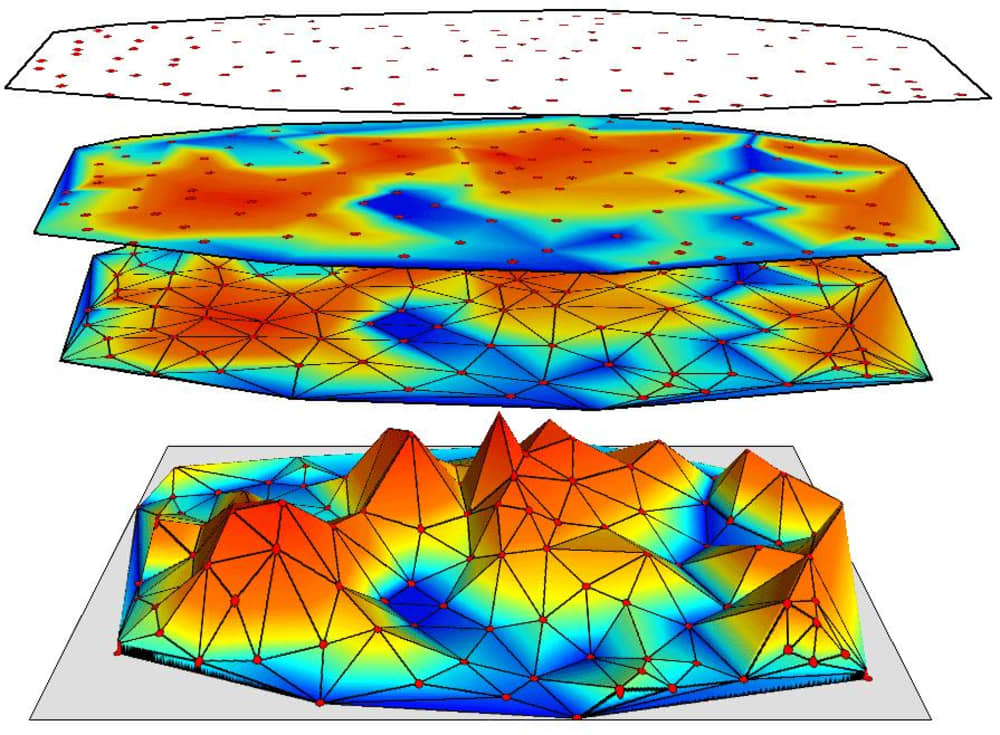
Puntenwolk: dit is een verzameling van punten met elk een X,Y,Z-coördinaat die samen een 3D-voorstelling geven (zie figuur 1a). Hoogtedatasets in rasterformaat kunnen daarentegen slechts 2.5D voorstellingen weergeven; voor iedere locatie (X, Y) kan slechts 1 hoogtewaarde (Z) weergegeven worden. Ter hoogte van een overstekend dak kan bijvoorbeeld enkel de hoogte van het dak of de hoogte van het grondoppervlak weergegeven worden, maar niet beiden gelijktijdig. Dit is wel mogelijk bij een puntenwolk. Meer specifiek bij een LIDAR puntenwolk, wordt er in specifieke bestandsformaten veel meer informatie per punt opgeslagen dan enkel de X, Y, Z-coördinaat, met name de intensiteit van de reflectie, de GPS tijd, het aantal echo’s per puls, de opvolgingsnummer van de echo, RGB kleurwaarden, de classificatie… Een puntenwolk is echter volumineuze data en vraagt gespecialiseerde software voor de verwerking. Om deze reden worden de hoogtegegevens vaak in meer gangbare formaten aangeboden.
Raster: Een raster stelt het DHM voor door middel van een regelmatig patroon van vierkante cellen, pixels, waarin 1 hoogtewaarde geregistreerd is (zie figuur 1b). Afhankelijk van de resolutie van het raster, de grootte van de pixels, kan het DHM in meer of minder detail voorgesteld worden. Voor de DHMV II standaard producten wordt gebruik gemaakt van resoluties van 1 m en 5m. Het rasterformaat is de meest voorkomende manier om een DSM of DTM te verdelen en te gebruiken.
TIN: Een Triangular Irregular Network (TIN-model) is een vectorgebaseerde voorstelling van de hoogte, opgebouwd uit een onregelmatig aantal knooppunten en lijnen met driedimensionale coördinaten (X,Y,Z) die zijn geordend in een netwerk van driehoeken die elkaar niet overlappen. Het voordeel bij het gebruik van een TIN is dat de punten variabel zijn verspreid en het volume van het bestand kan hierdoor worden beperkt. De verdeling kan gebaseerd zijn op een algoritme dat beslist welke punten het meest belangrijk (bruikbaar) zijn voor een nauwkeurige voorstelling van het terrein. In gebieden waar weinig variatie in hoogte is, liggen de punten verder uit elkaar dan in gebieden waar veel variatie in hoogte is.
Puntenwolk Raster TIN (geosolutions.com) De belangrijkste verschillen tussen beide datasetreeksen worden in onderstaande tabel opgelijst.
DHMV I DHMV II Opnameperiode 2001-2004 2013-2015 Gebied Vlaams Gewest Vlaams Gewest + 5km buffer
incl. Brussels Hoofdstedelijk GewestLiDAR-puntenwolk Brondata:
puntendichtheid
geometrische nauwkeurigheidformaat
gemiddeld 1 punt per 4m²
Planimetrisch (XY): 0,10 m
Altimetrisch (Z): 0,07 m
ASCII xyz
gemiddeld 16 punten per m²
Planimetrisch (XY): 0,10 m
Altimetrisch (Z): 0,05 m
LAZStandaard producten:
punten
DTM, raster
DSM, raster
1 punt per 20m² (GML3)
5, 25, 100 m (GML3; geoTiff)
niet beschikbaar
beschikbaar
1, 5 m (geoTiff)
1, 5 m (geoTiff)Luchtopnamen niet beschikbaar Beeldinformatie RGB Brondata:
resolutie
geometrische nauwkeurigheid
formaat
metadataDigitale luchtopnamen:
≤ 0,10 m
Planimetrisch (XY): 0,10 m
Tiff 6.0
oriëntatie + cameracalibratieStandaard producten:
resolutie
geometrische nauwkeurigheid
formaatOrthofotomozaïek:
0.10 m
Planimetrisch (XY): 0,20 m
JPEG2000Het dataformaat van een rasterproduct wordt gekozen in functie van de inhoud, het datavolume en de hanteerbaarheid van het formaat in standaard GIS- of beeldverwerkingspakketten.
TIFF: is een standaard formaat gebruikt voor de opslag van rasterbestanden zoals luchtfoto’s, waarbij de kwaliteit van het beeld behouden blijft. Voor professioneel gebruik is het belangrijk optimale beeldkwaliteit aan te bieden, bijvoorbeeld voor het uitvoeren van automatische classificaties van de bodembedekking. De individuele luchtfoto’s van het DHMV II worden, zoals alle ruwe beeldmateriaal van Informatie Vlaanderen, aangeboden in dit formaat. Digitaal Vlaanderen maakt gebruikt van versie 6.0.
geoTIFF: is een uitbreiding op het standaard TIFF-formaat waarbij in de metadata van ieder bestand parameters opgenomen zijn die het mogelijk maken het bestand in een GIS-softwarepakket op de correcte geografische positie weer te geven. Dit formaat wordt gebruikt voor de opslag van de standaard DHMV rasterproducten waarbij de hoogtewaarde weergegeven wordt als 32bit float. Met andere woorden, de hoogtewaarden worden gedefinieerd in meter met centimeter precisie en kunnen zowel positief als negatief zijn ten opzichte van het referentieniveau (TAW).
JPEG2000: JPEG is eveneens een standaard formaat voor de opslag van rasterbestanden, maar levert betere prestaties op het vlak van volumereductie in vergelijking met TIFF. Hierbij gaat echter een deel van de kwaliteit van het beeld verloren. Voor de orthofotomozaïeken van het DHMV II wordt, net als voor andere orthofotomozaïeken, gebruikt gemaakt van versie JPEG2000. Orthofotomozaïeken worden voornamelijk gebruikt als visuele rasterachtergrondlaag, en niet of nauwelijks voor automatische detectie, waardoor een minimaal kwaliteitsverlies te verantwoorden is in vergelijking met de performantiewinst die gehaald wordt door te werken met beelden met een kleiner datavolume.
Het LAZ formaat is de gezipte versie van het binaire LAS formaat dat specifiek gemaakt is om 3D puntenwolk data uit te wisselen. Het LAZ formaat heeft een compressieratio van gemiddeld 10 à 15% van het originele LAS formaat.
Het bestandsformaat LAS is een open dataformaat dat ontwikkeld is voor het beheren, uitwisselen en gebruiken van LiDAR puntenwolken, waarbij naast de geometrische component, specifieke informatie gerelateerd aan de inwinning en de verwerking van de data worden bijgehouden (o.a. GPS tijd, intensiteit, aantal echo’s en opvolgingsnummer van de echo, classificatie, RGB kleuren, vliegstrook nummer…).
Het LAS formaat biedt 2 grote voordelen ten opzichte van ASCII bestanden zoals die gebruikt werden voor de brondata van het DHMV I:
- Het binaire formaat heeft een veel grotere performantie voor het lezen en schrijven van XYZ hoogtedata;
- Het file formaat kan alle specifieke (meta)-informatie bewaren van de LiDAR missie waardoor ook de uitwisseling van data op een gestandaardiseerde manier kan verlopen zonder dat er extra metadata en extra bestanden moeten worden aangemaakt.
Het formaat is bruikbaar in gespecialiseerde software voor het verwerken van puntenwolken, hoewel meer en meer standaard GIS-pakketten dit formaat ook ondersteunen. Voor het DHMV II wordt gebruikt gemaakt van versie 1.4 (http://asprs.org/a/society/committees/standards/LAS_1_4_r13.pdf).
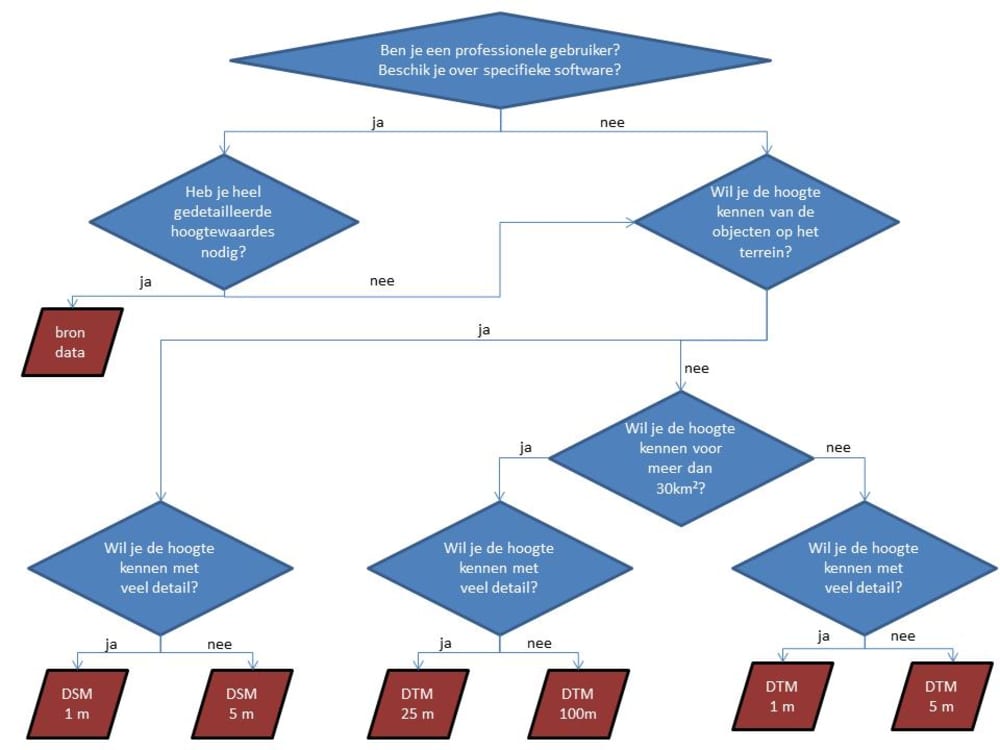
Welke product uit het DHMV productenaanbod het meest tegemoet komt aan je verwachtingen of de toepassing die je voor ogen hebt, hangt af van veel factoren. Hierbij stel je je best de volgende vragen:
- Welke hoogte-informatie is nodig: enkel van het terrein (maaiveld) of ook van objecten zoals gebouwen of vegetatie?
- Welk mate van ruimtelijk detail is noodzakelijk: een precieze hoogtewaarde om de paar centimeter, iedere meter of minder?
- De oppervlakte waarvoor je de hoogte wenst te kennen: heel lokaal voor een oppervlakte van een paar m², voor je gemeente of voor gans Vlaanderen?
- De mate waarin je vertrouwd bent met het werken met hoogtedatasets (en de software waarover je beschikt): ben je een professioneel of occasioneel gebruiker?
- Het verschil tussen de verschillende reeksen wordt hierboven verduidelijkt bij “Wat zijn de belangrijkste verschillen tussen DHMV I en DHMV II?”.
Volgende beslissingsboom stelt dit visueel voor.